Associé à ce module, un microcalculateur de type PIC 16F873A effectuera les calculs nécessaires pour déterminer l’heure légale, les dates de changement d’heure et fournir les signaux nécessaires à la commande de la pendule. Le module GPS offre deux sorties, l’une fournit sur un fil un top toutes les secondes de quatre microsecondes et l’autre une sortie série à 4800 bauds contenant une partie des trames normalisées du système GPS qui elles-mêmes contiennent la date et l’heure TU.
Une remarque sur les capacités extraordinaires de ce petit circuit qui coûte 30 €, nous avons un peu perdu nos capacités de surprise face aux formidables évolutions technologiques. Ce module de 35x41 mm est capable d’amplifier le très faible signal reçu d’un satellite de 3x10-20 watt soit 0,00000000000000000003 W (difficile de faire cuire un œuf) !
A titre indicatif en 1962 (il y a 53 ans) il fallait une antenne de 54 m de long pesant 340 tonnes avec des amplificateurs paramétriques refroidis à l’hélium liquide installée à Pleumeur Boudou en Bretagne pour recevoir les premiers signaux du satellite Telstar.
Autre performance, pour obtenir les différents paramètres de la localisation, le module effectue la résolution d’un système de quatre équations à quatre inconnues par la méthode des moindres carrés dix fois par secondes. Bref, cette petite merveille va nous donner l’heure !
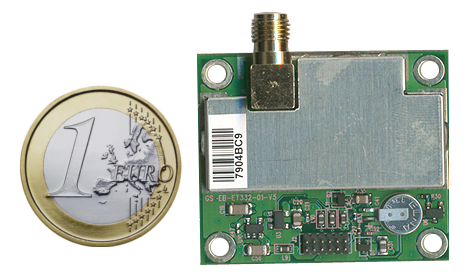

Le système de réception sera conçu à partir d’un module GPS (35x41 mm) qui reçoit les informations d'une petite antenne extérieure (45x37 mm) .
5-Algorithme de traitement
Le principe général retenu pour gérer la pendule est le suivant : le but étant de faire correspondre la position des aiguilles avec l’heure légale, nous enregistrons cette position dans un compteur qui contient donc 1440 positions puisque chaque 30 secondes l’aiguille des minutes avance d’un pas (une demi-minute). Ce compteur sert donc à mémoriser en permanence la position matérielle des aiguilles.
Le décodage du module va nous fournir de son côté l’heure légale, cette heure est transformée également en un compteur de référence en 1440 positions. Il ne reste donc qu’à contrôler en permanence que les deux compteurs sont égaux, s’ils ne le sont pas il faut soit ajouter des impulsions (retard) soit arrêter d’envoyer des impulsions (avance). Les tops de seconde fournit par le module GPS vont servir à incrémenter le compteur qui donnera une impulsion à la pendule toutes les trente secondes.
Pour les changements d’heure, un contrôle de la date sera effectué pour décider au bon moment (à 2 heures du matin le dernier dimanche d’octobre et de mars en temps universel) s’il est nécessaire d’ajouter une ou deux heures par rapport au temps universel et donc de retarder ou d’avancer la pendule en modifiant le compteur de référence. Reste le problème de coupure de courant. Il était possible de réaliser une sauvegarde du fonctionnement en utilisant une batterie de secours, mais ceci implique une maintenance à long terme de la batterie.
4-Conception
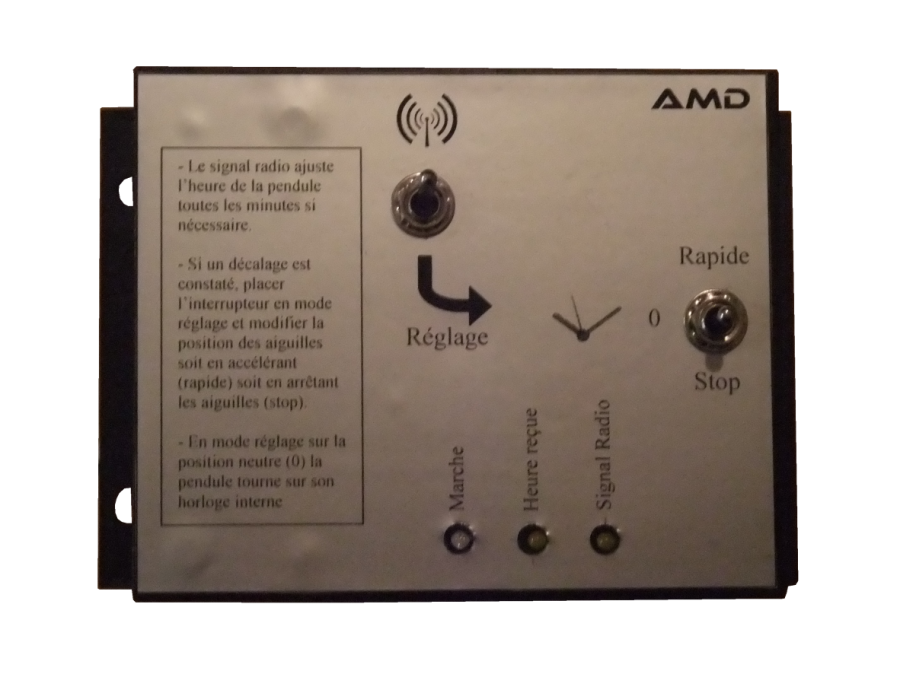
3-Boîtier de commande GPS
1-Une pendule mère pour la pendule ATO
Pour mémoire, le principe consiste à recevoir un signal radio modulé en amplitude à une porteuse de 77 kHz. Ce signal, une fois démodulé, contient 59 impulsions d’une seconde qui représentent 59 bits. Les 59 bits contiennent toutes les informations de l’année, de la date, du jour, de l’heure et des minutes. Une absence de signal pendant la 60ème seconde permet de synchroniser cette trame.
Un logiciel implanté dans un microcalculateur permet d’extraire l’heure exacte et d’envoyer les impulsions vers la pendule. Le boîtier a bien été développé, mais il ne sera pas présenté ici car après avoir testé positivement l’ensemble avec la pendule en laboratoire, il s’est avéré qu’il y avait un gros problème de réception du signal radio à l’endroit de mise en place des équipements dans le musée. Le signal reçu était trop faible, certainement dû à la configuration de l’endroit, des essais ont été fait même en installant l’antenne dans un étage au-dessus du musée, le résultat n’était pas satisfaisant, la synchronisation ne se faisait pas correctement. La décision s’imposait : il était nécessaire de remettre son travail sur la table et de redévelopper un système sur un autre principe. Cette fois, la synchronisation s’effectuerait par un signal GPS.
Le choix fait de piloter électroniquement la pendule fille ATO a entraîné la définition fonctionnelle d'un système de commande.
Sur le principe de base plusieurs choix étaient possibles : soit utiliser une horloge temps réel, c’est-à-dire un circuit électronique qui génère des tops à partir d’un quartz, avec une précision ± 2ppm (environ une minute par an la première année, puis plusieurs minutes les années suivantes), soit synchroniser par un système qui reçoit directement l’heure exacte par radio. Sur cette base synchrone il faut ajouter la possibilité de faire la mise à l’heure automatique suite à une coupure d’alimentation et, également le passage automatique aux heures d’été et d’hiver. Pour satisfaire toutes ces contraintes, nous avons choisi la solution d’une synchronisation par radio qui offre la plus grande stabilité dans le temps sans avoir à refaire des petites mises à l’heure.
Il existe un procédé très couramment utilisé pour les pendules et les montres : les émissions en grandes ondes DCF77.
Un petit rappel technique.
Le système GPS est constitué d’un ensemble de 24 satellites au minimum gravitant à 20 200 km au-dessus de la terre. Ces satellites émettent en permanence des signaux qui incluent en particulier les éphémérides permettant le calcul de la position des satellites, ainsi que des informations sur leur horloge interne. Ainsi, un récepteur GPS qui capte les signaux d'au moins quatre satellites équipés de plusieurs horloges atomiques peut, en calculant les temps de propagation de ces signaux entre les satellites et lui, connaître sa distance par rapport à ceux-ci et par trilatération, situer précisément en trois dimensions n'importe quel point placé en visibilité des satellites GPS (environ six à dix satellites visible à un moment donné). Ce qui nous intéresse ici, plus particulièrement, c’est la précision du signal temporel envoyé qui est généré par des horloges atomiques.
Une fois décodé le signal nous fournira un signal horaire parfaitement stable et précis. Cette information fondamentale est le Temps Universel Coordonné (UTC), la valeur reçue correspond approximativement à l’ancienne dénomination GMT. Néanmoins, l’heure ainsi délivrée ne tient pas compte du fuseau horaire du lieu et aussi de l’existence d’une heure d’été et d’hiver, il faudra donc, par logiciel, ramener ces données à l’heure locale.
2-Boîtier DCF77
Pendule mère pour pendule ATO 1
Ils réalisent...

Copyright © 2008-2023. Musée Horloger de Lorris Georges Lemoine, Tous droits réservés.